Robonox - Modifiche
In questa pagina si possono trovare tutte le modifiche eseguite sul robot. Oltre alle mie, sarò felice di mettere
foto e brevi descrizioni anche delle vostre modifiche. Se avete cambiato il vostro Robonox e volete pubblicare
la modifica, mandatemi una mail con qualche foto e la descrizione.
Occhi
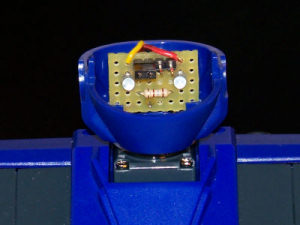
 Questo è il circuito che ho usato per gli occhi di Robonox. Il connettore J1 è uno di quelli per i servo, con i tre
fili colorati di nero, rosso e giallo.
Questo è il circuito che ho usato per gli occhi di Robonox. Il connettore J1 è uno di quelli per i servo, con i tre
fili colorati di nero, rosso e giallo.
Per i led ne ho utilizzati due blu da 3mm che avevo a disposizione, ma qualunque colore va bene (come dimensioni consiglio
invece di restare sui 3mm).
La resistenza R1 è da 180ohm, ma il valore può essere portato fino a 470ohm, a seconda della luminosità che desiderate.
Se si collega il ponticello n°1 gli occhi vengono pilotati dal processore tramite segnale pwm. Se invece viene collegato
il ponticello n°2 gli occhi prendono tensione direttamente dall'alimentazione dei servo e quindi restano sempre accesi fino
a che la batteria è collegata, anche se Robonox è spento (magari in questo caso lo potete usare come indicatore
per ricordarvi di staccare la batteria quando non usate il robot).
Il circuito l'ho montato tutto su un pezzo di una scheda per montaggi sperimentali, facendo i collegamenti a filo.
Se volete potete creare qualcosa di più professionale con la fotoincisione.
La cosa interessante di fare pilotare i led da un segnale pwm è che è possibile variare la luminosità in ogni
posizione del robot, perché vengono gestiti esattamente come i canali dei servo. Purtroppo allo stato attuale la
variazione tra la massima e la minima luminosità si nota appena, ma in futuro, con un nuovo firmware, si potrebbe
avere la possibilità di variare la luminosità da 0 (led spenti) fino alla luminosità massima.
Ecco altre immagini:

Questa è la mail inviatami da Ale per gli occhi da lui realizzati. Di seguito ci sono le immagini e il firmware
per il processore PIC.
occhi blue: funzionamento normale
occhio giallo: batterie inserite ma scheda spenta
occhio rosso: alternativo
ho realizzato il tutto con un pic12f509 , ma vanno bene anche i 508 (C o F), alimentato dal connettore del servo regolato con un 78l05
il segnale del servo entra nel pin GP4
il led giallo è collegato al GP0
i led blue sono collegati al GP1
il led rosso è collegato al GP5
usando un led bicolore giallo e rosso puoi montarlo al centro rispetto ai due blue,
non sapendo il livello di tensione che comanda i servo ho inserito un paio di resistenza per limitare l'ingresso...
le resistenze per regolare la corrente dei led... boh le ho messe a naso dipende dal tipo di led che uno usa,
meglio fare due prove prima... i miei blue abbagliano troppo ed illuminano 1-2 metri avanti...
Funzionamento : spostando il comando servo a cui è stato collegato il circuito a dx o sx si cambia lo stato
degli occhi (blue/rosso) ho inserito un po di isteresi per evitare situazioni di incertezza con lampeggio
stile albero di natale, perciò per passare da blue a rosso bisogna scendere un poco sotto la metà e per passare
da rosso a blue risalire un poco sopra la metà.




Cliccate sul diagramma del PIC per scaricare il firmware compilato.
Per caso notate qualche somiglianza con queste due immagini prese dalla serie giapponese di Gundam?


Cavi
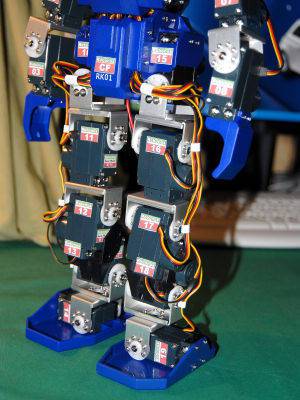
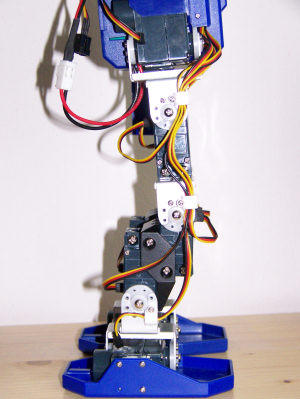
La seguente immagine mi è stata inviata da Concet69. È la sua modifica del passaggio cavi delle gambe di Robonox.
Come potete notare ha dovuto modificare il punto di uscita dei cavi dai servo. Questo ha due vantaggi: innanzitutto
consente di farli arrivare al torace senza problemi (senza questa modifica sarebbero stati un po' troppo in tensione),
poi allontana i cavi dai joint in alluminio, evitantone quindi lo sfregamento e la possibile usura.
Inoltre direi che ha anche invertito i servo delle gambe, visto che le prese d'aria dei motorini sono all'esterno
e non più all'interno.
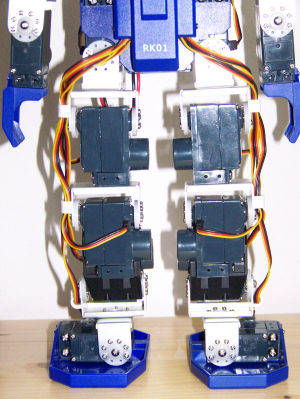
Altre due foto di una modifica analoga, questa volta realizzate da Daniele Cacciabaudo:


Queste invece sono le foto della mia modifica. Se notate ho cambiato anche il percorso di due cavi (servi 11 e 16) che
ho fatto passare davanti come gli altri delle gambe, invece che posteriormente dalla schiena.
Il prossimo passo è sistemare l'uscita dei cavi dai servi delle braccia.
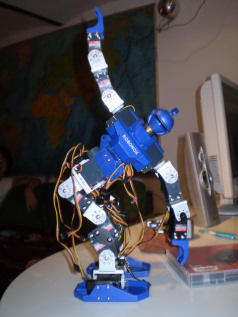
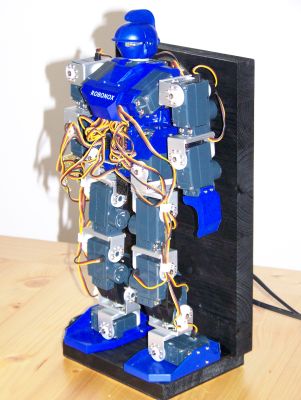
Stand-up

Visto che Giorgi non sembra voler fornire un supporto per Robonox, ho deciso di costruirmelo utilizzando materiale che
avevo in casa.
Il supporto è formato da due parti in legno (uno per la base e uno per lo schienale) unite insieme utilizzando colla
vinilica e due viti per rendere il tutto più resistente.
Per risolvere il problema che Robonox non resta in piedi senza
alimentazione, ho deciso di attaccare allo schienale del supporto un altro pezzo di legno sul quale Robonox può "sedersi"
ed evitare così di cadere.
Il tutto è stato poi verniciato di nero utilizzando colori acrilici e un pennellino.
Dalle foto dovrebbe essere abbastanza chiaro come ho realizzato questo supporto. Sulla parte posteriore ho aggiunto altre
quattro viti per fare da porta caricabatterie (altrimenti finirei per perderlo sicuramente!).
Per evitare lo sbilanciamento del robot in avanti, ho aggiunto una calamita all'altezza delle spalle di Robonox, recuperata
da un vecchio hard disk rotto.
Questa calamita è molto potente e riesce ad attirare le viti del servo della testa, tenendo quindi Robonox appoggiato allo
schienale.
Eventualmente si può utilizzare una calamita meno potente, attaccando un pezzo di metallo a Robonox dove la calamita
possa fare presa.
Probabilmente il supporto che avrebbe dovuto fornire Giorgi avrebbe "appeso" Robonox tenedolo sollevato. Altri robot molto
simili al nostro hanno dei supporti del genere, ma oltre ad essere utilizzati per riporre il robot, vengono usati anche
per la creazione dei movimenti. Tenendo il robot sollevato da terra non c'è bisogno di tenerlo fermo con le mani in
certi movimenti intermedi che possono sbilanciarlo.
Per ora però non mi interessa un tale supporto e mi basta poter tenere Robonox da qualche parte quando non lo uso.



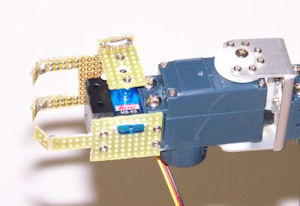
Mani

Finalmente ho terminato la realizzazione di una mano prensile per Robonox. Ho dovuto fare un po' di prove, prima di ottenere
un risultato soddisfacente.
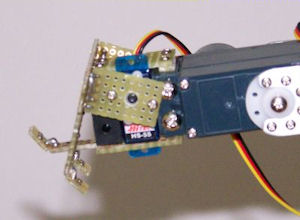
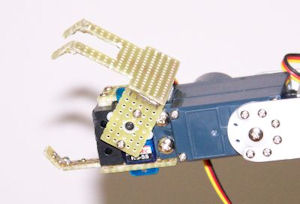
Ho studiato diversi tipi di mani "prensili" ed alla fine ho deciso di utilizzare quella che vedete nelle foto.
Questa mano è leggera, ha circa le stesse dimensioni di quella originale di Robonox (è più lunga, ma davvero di poco) e consente
una buona presa su diversi oggetti.
Purtroppo non ha la resistenza per sostenere il peso del robot. Il materiale ideale sarebbe la plastica o ancora meglio l'alluminio
(non quello delle lattine che ho provato senza successo, ma qualcosa tipo i joint frame di Robonox),
ma non ho la possibilità di utilizzare questi materiali, quindi mi sono accontentato.
Se qualcuno avesse la possibilità di realizzare questi pezzi in plastica o in alluminio, sarò felice di fornire tutte le misure
che servono.
Adesso devo preparare anche la mano sinistra, ma ora che ho tutte le misure non dovrebbe essere complicato. Qui sotto, oltre alle foto,
potete vedere un filmato della mano in azione.
Nelle foto potete vedere la mano in diverse posizioni e il servo che ho utilizzato per la realizzazione.

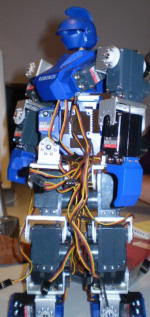
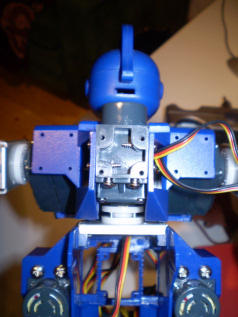
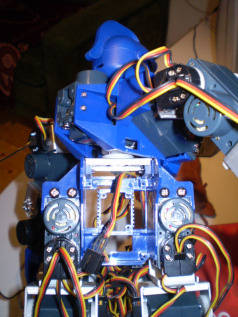
Torso
Massimo Tonielli mi ha inviato le foto di una modifica davvero notevole a Robonox. Ha invertito il servo della testa
e lo ha utilizzato per ottenere la rotazione del busto.
Questa la descrizione che mi ha inviato:
Ho modificato il telaio centrale dividendolo in due sezioni, superiore ed inferiore.
Quella inferiore è quella che contiene i servo delle anche, la scheda di controllo ed il pacco batteria.
Quella superiore contiene i servo delle spalle e della testa.
Ho utilizzato il servo della testa mettendolo sottosopra e modificando un joint frame, adattandolo alla parte
inferiore ovvero quella che contiene la scheda di controllo e la batteria, sono riuscito a far ruotare la parte
superiore del busto.
L'effetto è che in caso di combattimento la braccia di robonox sono più efficaci.
Ovviamente questa modifica elimina la rotazione della testa, che secondo me è superflua.
E qui trovate le foto: